
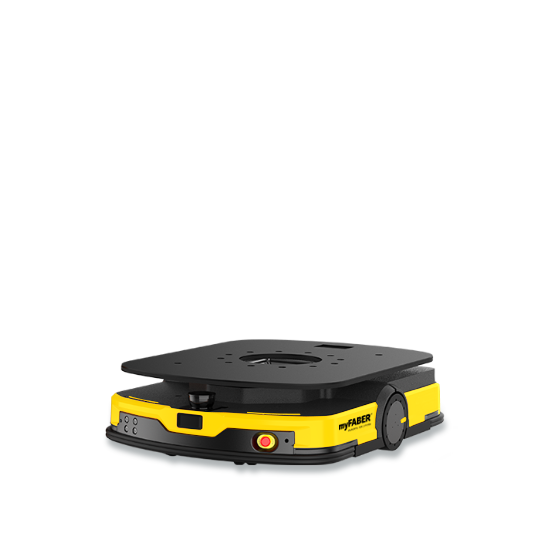
myFABER® AMR Q7-1000
Technologie LMR (Latent Mobile Robot) představuje moderní a efektivní způsob automatizace skladových operací a logistiky. Tato technologie se vyznačuje zvedacím mechanismem, optimalizovaným pohybovým výkonem a zvýšenou bezpečnostní ochranou, což pomáhá zákazníkům vytvářet bezpečnější pracovní prostředí a nákladově efektivnější produktivitu. myFABER® AMR Q7-1000 je navržen tak, aby autonomně prováděl přepravu nákladů mezi různými částmi skladu nebo výrobními linkami, což z něj činí ideální volbu pro širokou škálu průmyslových aplikací, kde je potřeba zvýšit efektivitu a snížit náklady na pracovní sílu.
Popis
Klíčové parametry myFABER® AMR Q7-1000
Jedním z nejdůležitějších technických parametrů modelu myFABER® AMR Q7-1000 je jeho nosnost až 1 000 kg. Tento robot je vybaven baterií s kapacitou 48 V 28 Ah, která umožňuje provozní čas až 8 hodin na jedno nabití. Rychlost pohybu bez nákladu dosahuje až 2 m/s, zatímco s nákladem se pohybuje rychlostí 1,8 m/s. Nabíjecí čas činí pouhých 1,5 hodiny, což zajišťuje minimální prostoje a zvyšuje efektivitu provozu. Životnost baterie dosahuje až 1500 cyklů, což zajišťuje dlouhodobou výkonnost a spolehlivost.
myFABER® AMR Q7-1000 vyniká svou vysokou přesností umístění až 10 mm
myFABER® AMR Q7-1000 je vybaven pokročilými bezpečnostními prvky, které zahrnují boční ultrazvuk, přední a zadní kolizní lišty, přední a zadní nouzové zastavení, přední bezpečnostní laser, světelné indikátory a zadní TOF senzor. Robot také disponuje zvukovými a světelnými alarmy, které zajišťují jeho bezpečný provoz. Přesnost umístění dosahuje 10 mm a 1°, což je klíčové pro přesnou manipulaci s nákladem a minimalizaci chybovosti při skladových operacích.
Schopnost pohybovat se i v úzkých uličkách a složitějších terénech
Díky diferenciálnímu pohonu a kompaktním rozměrům (1 150 x 820 x 256 mm) je tento AMR robot schopný se pohybovat i v úzkých uličkách a složitějších skladových prostředích. Maximální rychlost rotace činí 200°/s, což umožňuje rychlé a efektivní manévrování ve skladovacích prostorách. Robot je navržen tak, aby poskytoval maximální flexibilitu a výkon, čímž je schopen efektivně řešit náročné úkoly v různých provozech.
Parametry
| Technologie | |
|---|---|
| Navigace | |
| Režim pohybu | |
| Přesnost umístění | |
| Nabíjecí čas | |
| Provozní čas |
Galerie
Videa
Dokumenty
Produktový list
Produktový list
Produktový list
