
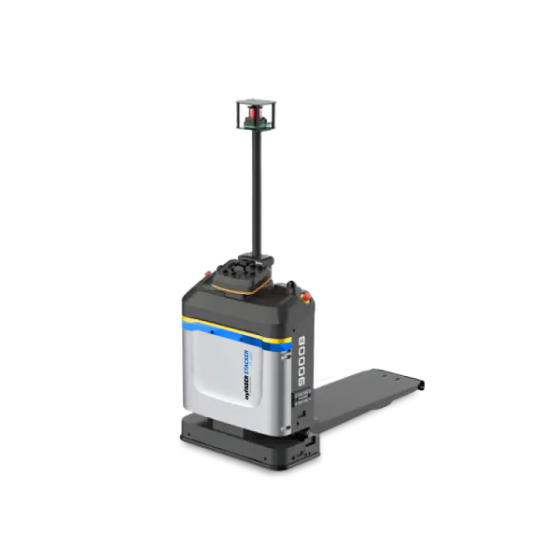
myFABER® Stacker F1-500T
Technologie AGV (Automated Guided Vehicle) představuje revoluční přístup k automatizaci skladových operací, především v oblasti manipulace s náklady. myFABER® Stacker F1-500T je vysokozdvižný stohovací vozík navržený pro autonomní práci s paletami a dalšími náklady. To jej činí ideálním řešením pro širokou škálu průmyslových aplikací. Tento robot se hodí pro logistická centra, výrobní linky i velké sklady, kde je klíčová efektivita a snížení provozních nákladů.
Popis
Klíčové parametry myFABER® Stacker F1-500T
Tento ,,mono“ paletový robot se vyznačuje jen jednou vidlí, a je tedy vhodný pro širokou škálu operací ve výrobě, kde je třeba manipulovat s úzkými vozíky apod. Jeho nosnost až 500 kg a maximální výška zdvihu 400 mm umožňují efektivní manipulaci s náklady na různých úrovních skladových regálů. Robot je vybaven baterií s kapacitou 48 V 24 Ah, která umožňuje provozní čas 6-8 hodin na jedno nabití. Rychlost pohybu s nákladem i bez něj dosahuje 1 m/s, což zajišťuje rychlou a efektivní manipulaci s materiály.
myFABER® Stacker F1-500T vyniká svou vysokou přesností umístění až 10 mm a 1°
Bezpečnostní prvky zahrnují laserové a fyzické vyhýbání se překážkám, což zajišťuje bezpečný provoz i v dynamickém skladovém prostředí. Tento vysokozdvižný stohovací vozík je navržen s důrazem na spolehlivost a dlouhodobou výkonnost, což z něj dělá ideální volbu pro firmy, které hledají bezpečné a účinné řešení pro optimalizaci svých logistických operací.
Vhodný do uliček s minimální šířkou 1 754 mm
Díky svému všesměrnému pohybu a kompaktním rozměrům (1 257x800x1 545 mm) je myFABER® Stacker F1-500T schopen se pohybovat i v úzkých skladovacích prostorech. Rychlost zdvihu s nákladem i bez něj dosahuje 50 mm/s, což umožňuje efektivní a rychlé manévrování ve skladu. Tento vysokozdvižný stohovací vozík je navržen tak, aby poskytoval maximální flexibilitu a výkon, čímž efektivně zvládá náročné úkoly v různých typech provozů.
Parametry
| Maximální výška zdvihu | |
|---|---|
| Minimální šířka uličky | |
| Nosnost | |
| Rychlost zvihu s nákladem | |
| Rychlost zdvihu bez nákladu | |
| Vidlice tloušťka*šířka*délka | |
| Velikost robota D*Š*V | |
| Navigace | |
| Režim pohybu | |
| Rychlost pohybu s nákladem | |
| Rychlost pohybu bez nákladu | |
| Bezpečnostní ochrana | |
| Přesnost umístění | |
| Nabíjecí čas | |
| Kapacita baterie | |
| Provozní čas |